New Robot Crawls, Climbs and Sneaks Into Crannies
New Robot Crawls, Climbs and Sneaks Into Crannies
July 12, 2018
By Evan Ackerman, a Fromson Fellow on the 2017 Murray Fromson Journalism Fellowship.
IEEE Spectrum – We’re always impressed by the way Dr. David Zarrouk, director of Ben-Gurion University of the Negev’s Bio-Inspired and Medical Robotics Lab and a lecturer in the Department of Mechanical Engineering, manages to extract a ton of functionality from the absolute minimum of hardware in his robots. In the past, we’ve seen clever designs like a steerable robot that only uses a single motor, and a multi-jointed robot arm that uses a traveling motor to actuate all of its degrees of freedom.
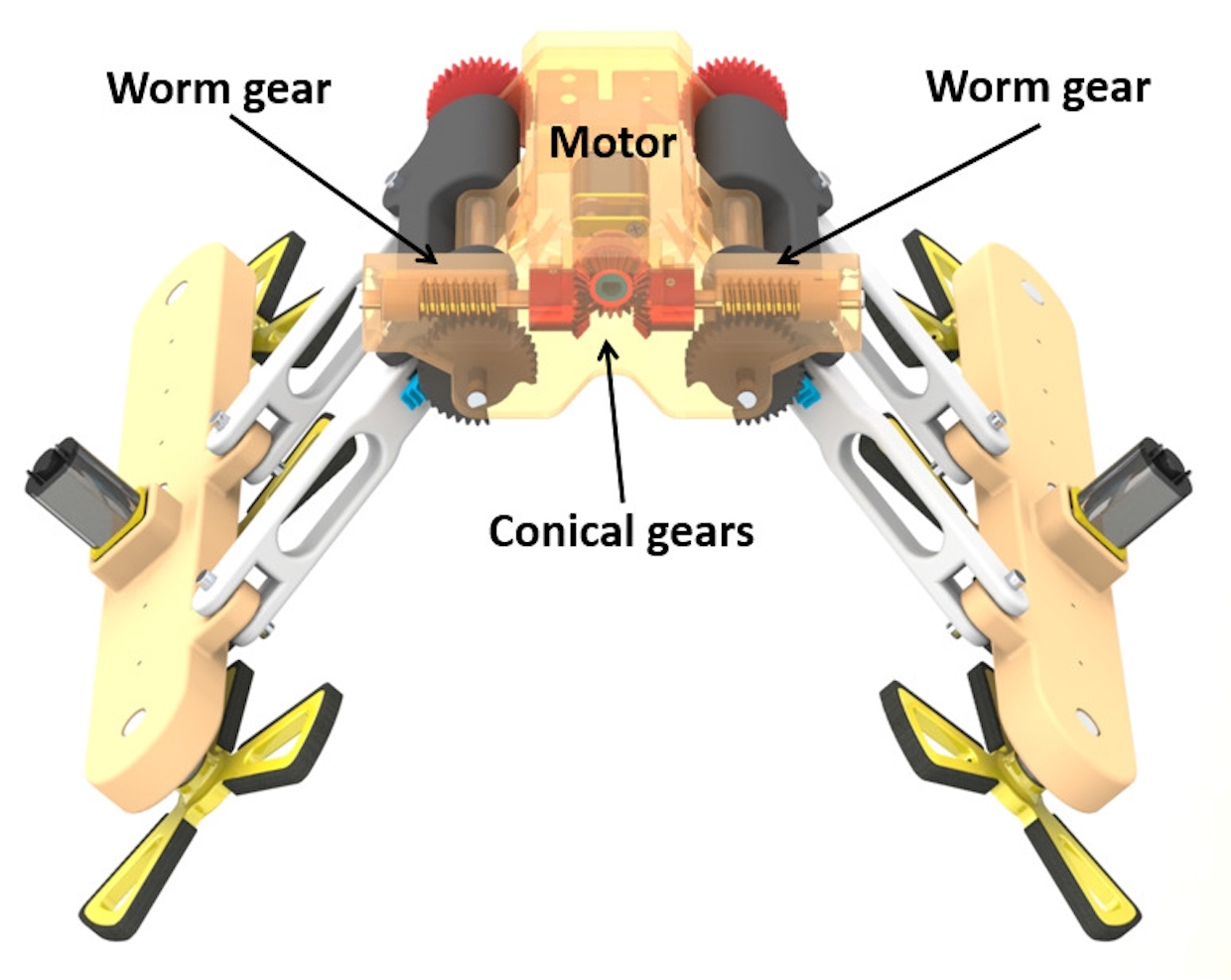
A breakdown model of RSTAR
At the 2018 IEEE International Conference on Robotics and Automation (ICRA) in Brisbane, Australia, Dr. Zarrouk presented an update to STAR, the Sprawl-Tuned Autonomous Robot, called Rising STAR, or RSTAR. The robot allows its body to move separately from its legs, changing its center of mass to help it climb over obstacles.
RSTAR is the latest in Zarrouk’s series of sprawling robots, designed to handle all kinds of terrain obstacles while minimizing cost of transport. “Sprawl” in this context refers to the robot’s legs, which are angled (adjustably) downwards and outwards from the body. RSTAR has an added degree of freedom in that its body is able to change its location relative to the legs, altering the robot’s center of mass.
It seems like a simple change, but it enables a bunch of new behaviors—not only can the robot climb over larger obstacles without flipping over, but it can also climb vertically up closely spaced walls and “crawl” through narrow gaps by adopting a legged walking gait.

Evan Ackerman discusses the latest updates to the RSTAR with Dr. Zarrouk.
IEEE Spectrum: What are some potential applications for RSTAR or robots like it? Specifically, what potential applications would RSTAR be ideal for that other robots would have trouble with?
David Zarrouk: The STAR family of robots is very suitable to performing search and rescue operations, especially in unstructured environments such as collapsed buildings or flooded areas. In a genuine search and rescue operation, a robot often must overcome multiple successive obstacles of different types to reach its target. We built RSTAR having in mind that it should be simple, reliable and be able to overcome multiple commonly available obstacles without any external mechanical intervention. RSTAR combines several climbing capabilities and shape changes, allowing it to climb over obstacles or sneak in between or under cracks. Besides that, RSTAR is relatively fast and has a relatively low energy consumption, which together increase its working range and work time.
In what other ways would you like to improve RSTAR or make it more versatile?
There are two main upgrades that we currently have in mind for RSTAR. First, we are currently using machine-learning algorithms for teaching RSTAR to perform some simple maneuvers to climb over specific obstacles. So, eventually RSTAR would have some partial autonomy. Second, we are considering increasing its mechanical capabilities by controlling the length of the FBEM rods.
Can you tell us more about the larger version of the robot at the end of the video?
As the size of obstacles a robot can climb is limited by its own size, we decided to build a larger version which would be able to climb over larger obstacles and stairs. The larger version can carry a two kilogram payload of sensors and supplies. It can also be used to carry a smaller STAR or RSTAR robot. A larger STAR carrying a smaller STAR would increase the scouting capability of both, as the larger robot would carry the smaller robot over larger obstacles and closer to the destination, while the smaller one would be able sneak in between smaller cracks and passages.
Read more on the IEEE Spectrum website >>
Stories Like This