Octopus Points to the Future of Keyhole Surgery
Octopus Points to the Future of Keyhole Surgery
May 3, 2016
Horizon — Keyhole, or minimally invasive surgery can offer many benefits over more traditional, open operations, including reduced risk of infections, quicker recovery times and less scarring.
But internal organs can get in the way when hard robotic arms are used, given that access can be very limited and soft tissue can sometimes move in unexpected ways.
The EU-funded STIFF-FLOP project has designed, built and operated a soft robotic arm that can squeeze into the body, maneuver gently around soft tissue, reconfigure itself, and stiffen to perform tasks that need force.
The octopus provided some inspiration for the project. They have no bones or skeletal structure and can squeeze through very narrow openings, and can stiffen when needed.
EU-supported researchers, like BGU’s Dr. Ilana Nisky, have been working to improve the software that controls surgical robots and tools — such as graspers or scalpels — and provide the surgeons who use them with the sense of touch when tissue is palpated, grasped or cut.
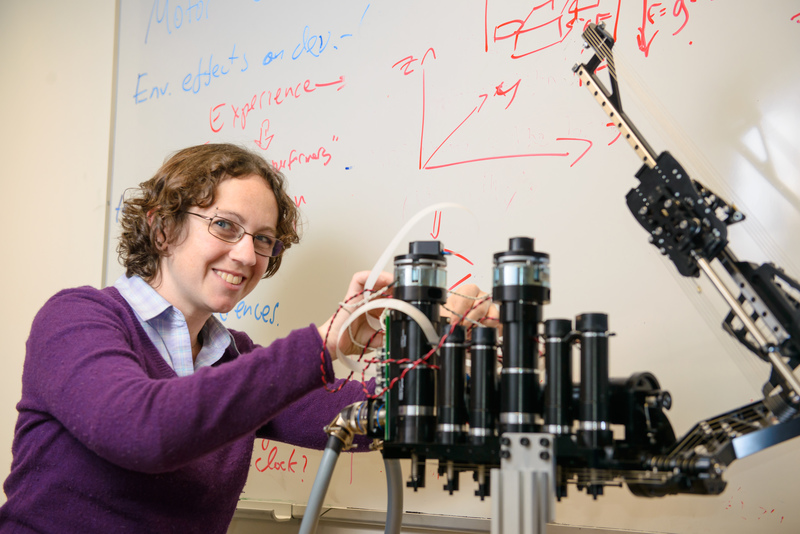
Dr. Ilana Nisky is working to improve the software that controls surgical robots.
“Any kind of design choice, any kind of device, any new control system, has to be grounded in what we as motor neuroscientists understand about how people control motion and perceive information,” says Dr. Nisky, head of the Biomedical Robotics Lab at BGU.
“From the side of the surgeon, we are developing the software that will make them feel as if they are present there, so that it is really natural.”
Dr. Nisky’s research has found that very experienced surgeons operating with robotic equipment use a far greater “toolbox” of hand and arm movements in carrying out operations than novices do.
“We hope that eventually robots will make it easier to learn how to use them too,” Dr. Nisky says.
“Lead surgeons can do marvelous things with the robots, and by improving the controls and systems we hope that will shorten the learning curve for novices and they will be able to master complicated procedures faster,” adds Dr. Nisky.
Read more on the Horizon website >>
Stories Like This